DCモータを「物理」から解き明かす:回路と運動のシステム定義
システム定義:電気と機械の境界線
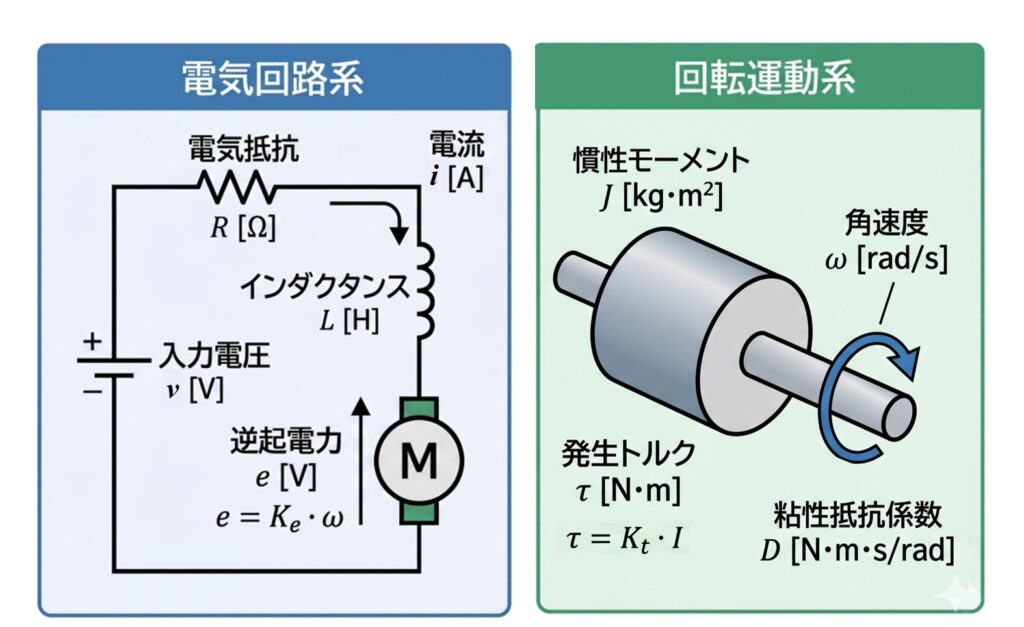
DCモータ(直流モータ)は、電気エネルギーを機械的な回転運動に変換する装置です。その構造は、大きく「電気回路(入力側)」と「回転体(出力側)」の二つの世界に分けられます。
- 電気回路側: 電圧 v を入力とし、抵抗 R とインダクタンス L を経て電流 i が流れます。ここで重要なのは、モータが回転することで発生する「逆起電力 e」の存在です。
- 回転運動側: 発生したトルク τ によって慣性モーメント J を持つロータが回転します。そこには回転速度に比例する粘性抵抗 D がブレーキとして作用します。
DCモータについてざっと調査した記事も参考にしてみてください。
記事リンク:モータ技術データ調査と将来展望(作成中)
物理法則を書き出す:二つの方程式
次に、それぞれの世界で起きている現象を数式化します。
今回は入力を電圧 v(t) ,出力をモータの回転速度 ω(t) として考えてみます。
電気系の電圧方程式
回路を一周する電圧の関係を記述します。

ここで、逆起電力  は回転速度
は回転速度  に比例します
に比例します 。
。
機械系の運動方程式
回転軸まわりのトルクのバランス(ニュートンの運動方程式)を記述します。

ここで、発生トルク τ(t) は流れる電流 i(t) に比例します τ(t) = Kti(t) 。
電気と機械をつなぐ「変換係数 K」
この二つの世界を橋渡ししているのが、モータ定数 K( Ke および Kt )です。
- Kt (トルク定数): いくら電流を流せば、どれだけ力が湧くか
- Ke (逆起電力定数): どれだけ速く回れば、どれだけ電圧を跳ね返すか
SI単位系では Kt = Ke = K となり、電気と機械が全く同じ係数で結ばれています。
単位で見る「パワー」の等価性
ここで、Kが共通であるのが正しいことを単位の視点から確認しておきましょう。
電気的なパワー Pe と機械的なパワー Pm は、理想的な変換状態(損失ゼロ)において等しくなります。
![P_e = e \cdot i [V \cdot A]](https://shoka-techtour.com/wp-content/ql-cache/quicklatex.com-2256cdc440704b0cf148f1b76d3e729b_l3.png "Rendered by QuickLaTeX.com")
![P_m = \tau \cdot \omega [N \cdot m \cdot rad/s]](https://shoka-techtour.com/wp-content/ql-cache/quicklatex.com-833ce8f111faecefdda75ad371594d8f_l3.png "Rendered by QuickLaTeX.com")
ここで e = Kω, τ = Ki を代入すると、どちらも K・i・ω となり、単位が完全に一致することが証明できます。
他にも確認する方法はいくつかありますので参考ページを載せておきます。
参考ページ:Nidec HP
二つの世界をつなぐ:伝達関数の導出
物理法則として定義した「電気回路の方程式」と「回転運動の方程式」。これらをつなぎ合わせることで、電圧 v を入れたとき、最終的に回転速度 ω がどう変化するかを一つの式で表すことができます。
まずは、ここまでの式をラプラス変換して並べてみましょう。
電気系: 
機械系: 
ここで物理的な流れを整理すると、以下のようになります。
電圧 V → 電流 I ∝トルク T → 回転速度 Ω
この流れを一本の数式に集約するため、電気系の式の I(s) に、機械系の式を代入します。

これを Ω(s)/V(s) について整理すると、DCモータの伝達関数G(s)が導き出されます。

機械系の粘性は小さく無視できることが多いので、D ≒0として扱い、K/JLでまとめると、

となります。
二次遅れ系としての特性を読み解く
この伝達関数の形を見ると、分母が s の二次式である「二次遅れ系」の基本形であることが分かります。

この形と照らし合わせることで、モータの挙動を予測できます。
固有振動数 ωn:応答の「速さ」の指標

- 物理的な意味: システムがエネルギーをやり取りする「素早さ」を表します。
- パラメータの影響:
- 分母にある慣性 J(機械的な重さ)やインダクタンス L(電気的な重さ)が小さいほど、ωn は大きくなり、システムは機敏に反応します。
- 分子にある K(磁石とコイルの結合の強さ)が大きいほど、エネルギー変換の効率が上がり、応答が速くなります。
減衰係数 ζ:振る舞いの「しなやかさ」の指標

- 物理的な意味: 発生した振動をどれだけ抑え込めるか、というブレーキの利き具合を表します。
- パラメータの影響:
- 電気抵抗 R が大きいほど、電気エネルギーが熱として消費されるため、振動を抑える力(減衰)が強くなります。
- 面白いのは √J/L の部分です。電気的な慣性 L に対して機械的な慣性 J が大きいほど、相対的にどっしりとした落ち着いた挙動(ζが大きい状態)になります。
パラメータをいじる=性格を変える
この式を知っていれば、もっとキビキビ動かしたいなら J や L を削る、オーバーシュート(行き過ぎ)を抑えたいなら R を調整する、といった設計の指針が立ちます。
単なる数字の羅列だった伝達関数が、ωn と ζ というレンズを通すことで、モータの動きとして読み解けるようになるのです。
まとめ:システムを理解し、制御を「意のまま」に
ここまで、DCモータというシステムを「回路図」と「運動の定義」から出発し、最終的に一つの伝達関数へと変換してきました。
物理現象を数式として正しく捉えることができれば、それはもうブラックボックスではありません。この伝達関数という「土台」があるからこそ、PID制御などを活用して、目標の速度へピタリと合わせる電子制御が可能になります。
なぜ動くのかを知ることは、どう動かすかを支配するための第一歩です。この強力な武器を手に、次はより高度な制御の世界へ踏み出してみましょう。